


В Челябинске вовсю осваивают мехатронику — сочетание электроники и механики. Она помогает строить роботов-манипуляторов, готовых работать в промышленности, в том числе в условиях, в которых трудно действовать человеку. Например, при экстремальных температурах или в химически агрессивной среде.
Студенты-третьекурсники ЮУрГУ Тимур Бахтимиров и Андрей Юмачиков летом подрабатывают по специальности – делают учебные стенды с применением электроники, механики, гидравлики. Также ребята получили первые патенты на изобретение. Под руководством молодых преподавателей кафедры электропривода, мехатроники и электромеханики Никиты Савостенко и Ивана Холодилина, Тимур и Андрей вместе с соавторами создали виртуальную лабораторию для промышленной сборки и сортировки деталей.
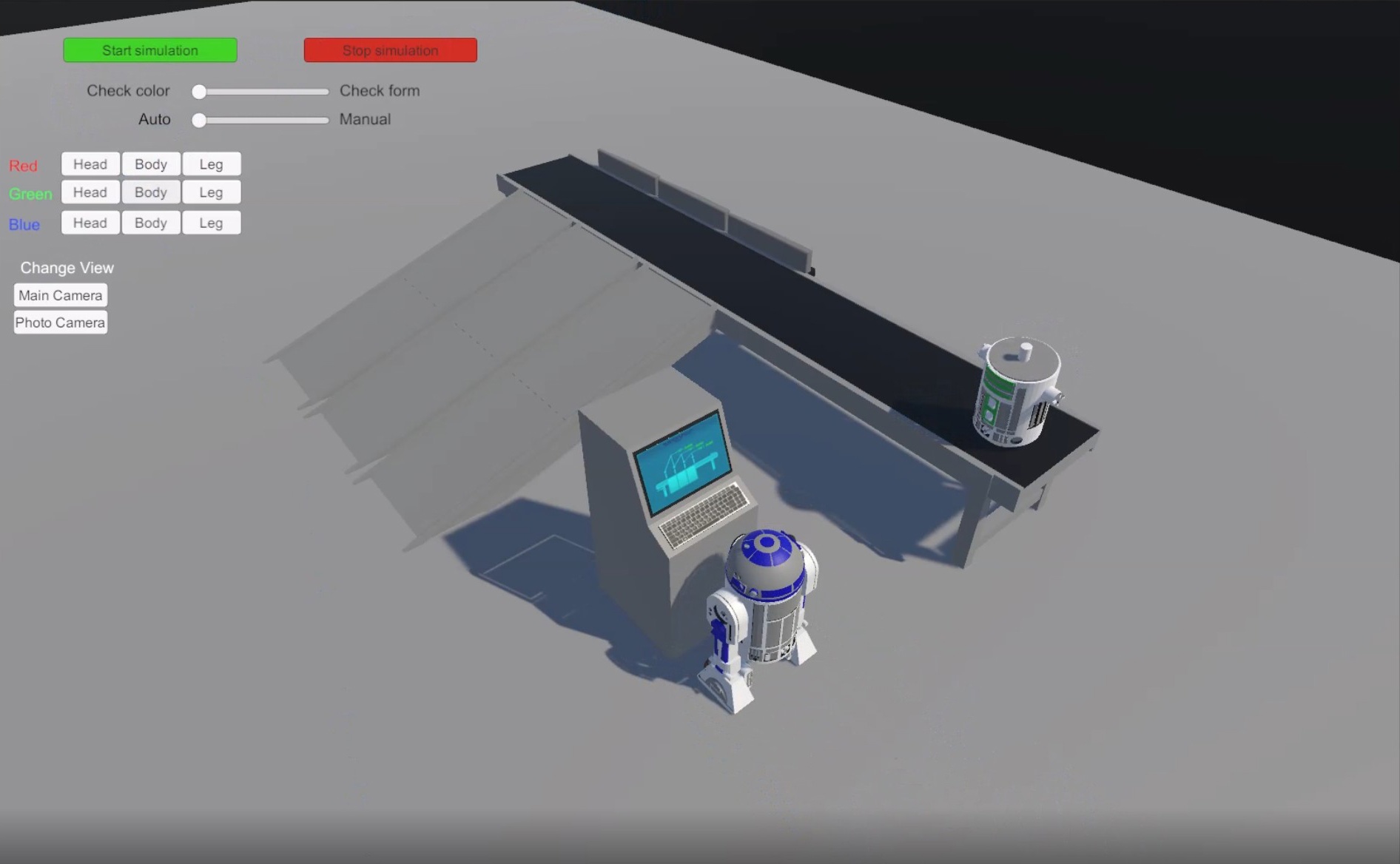
Представьте конвейер, где роботы собирают роботов. По конвейеру движутся детали. Один робот сортирует их, а другой занимается сборкой. Пока модель, построенная студентами, распознает детали трёх видов – «голова», «рука» (манипулятор) и «туловище». Детали окрашены в один их трёх цветов – красный, зелёный, синий.
Робот через глаз-камеру видит, что конвейер выдал очередную деталь, поворачивает к ней голову, чтобы зафиксировать её положение. Как задать деталь, чтобы её научился «видеть» компьютер? Инженер прибегнет к программам SolidWorks и Blender, в первой он достаточно легко может создавать объекты сложных форм и размеров, а во второй наносить высокополигональную текстуру на этот объект.
А чтобы виртуальная лаборатория выглядела как настоящая, молодые авторы использовали движок Unity, который обычно применяют для разработки компьютерных игр. Теперь процесс можно увидеть на экране как в игре.
Построить сам робот с манипулятором весьма недёшево. Студенты придумали алгоритм, отдающий команды контроллеру робота. Но саму микросхему делать не обязательно: хватит программного комплекса TIA Portal – симулятора микроконтроллеров. Команды отдаются именно ему.
Роботу-сортировщику работать труднее, чем роботу-сборщику. Ему нужно не только «увидеть» деталь, но и распознать её форму, а затем с помощью выдвижных заглушек направить изделие дальше по одному из трёх маршрутов. Здесь вместо игровой платформы Unity на помощь приходит Mathlab. Каждому пикселю, полученному с камеры соответствует шесть чисел – три координаты в пространстве и три интенсивности цветовых компонентов: красного, зелёного и синего. Распознаются грани и контуры, алгоритм принимает решение и отдаёт команду контроллеру, пока виртуальному.
Пока модель работает с деталями определенной формы с погрешностью в 15%: если деталь уйдёт по конвейеру слишком далеко или будет выглядеть нестандартно, то робот её не заметит.
— В принципе, детали могут быть любой формы, – поясняет Андрей Юмачиков. – Но для этого хорошо бы подключить к нашей модели искусственный интеллект.
Как знать, может быть, в будущем студентам удастся реализовать и это. Во время экскурсии на Челябинский Трубопрокатный завод ребята видели подобных роботов-перекладчиков. А их однокурсники на Челябинском Цинковом заводе научились распознавать перегрев и коррозию электродов по оттенкам цвета, с помощью нейросети. Так что алгоритмы, подобные тому, что работали студенты-мехатроники востребованы на промышленных предприятиях Южного Урала уже сегодня.































{kind=link}
{kind=link}
{kind=link}
{kind=link}